oslsim

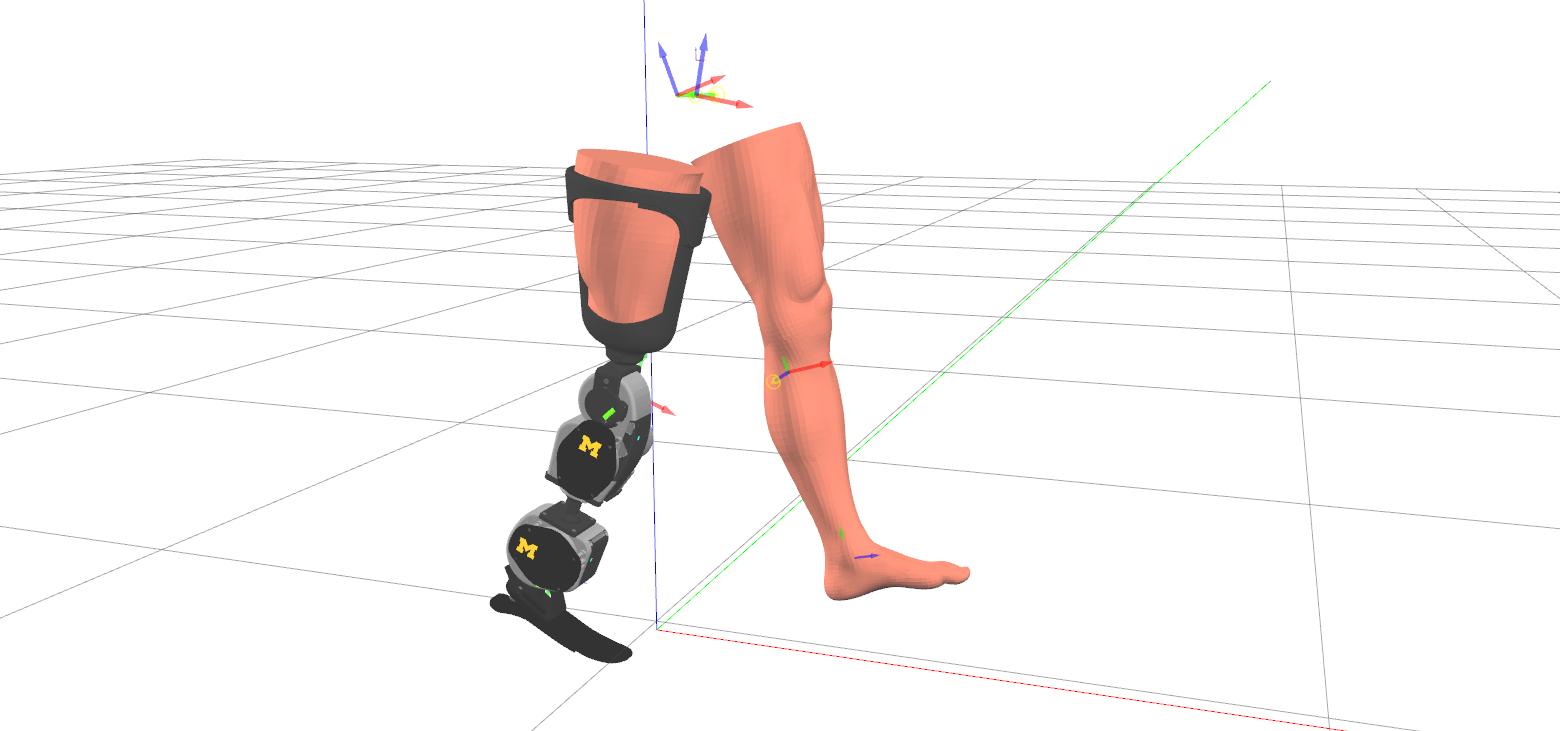
A ROS package that provides the necessary interfaces to simulate the Open-source leg (OSL) proposed by the Neurobionics Lab at the University of Michigan to unify the research field of prosthetic leg controls. OSL is a robust and relatively inexpensive system that can be easily manufactured, assembled, and controlled. OSL is licensed under a Creative Commons Attribution 3.0 Unported License. To know more, visit https://opensourceleg.com
Getting Started
This package requires an installation of ROS and Gazebo.
$ sudo apt-get install ros-<ros-distro>-desktop-full
$ sudo apt-get install ros-<ros-distro>-ros-control
$ sudo apt-get install ros-melodic-effort-controllers
Preferred <ros-distro>: melodic. If you are new to ROS, read more about Configuring your ROS environment.
Build the package along with Gazebo ROS motor plugins in your catkin workspace.
$ cd <catkin-workspace>/src
$ git clone https://github.com/nilseuropa/gazebo_ros_motors
$ git clone https://github.com/homebrew-bionics/oslsim.git
$ cd ../
$ catkin_make
$ source devel/setup.bash
Sensors
The Open-source Leg (OSL) model depicted in this package comprises
- 2 Inertial Measurement Units (IMU)
- 2 Actuators (with Rotary encoders, Motor Joint states, Current, and Voltage data)
- a Load cell
Configuration
Actuator parameters are loaded from yaml files (osl_knee.yaml and osl_ankle.yaml). They can also be set through dynamic reconfiguration server,
$ rqt
>> Plugins >> Configuration >> Dynamic reconfigure
Topics
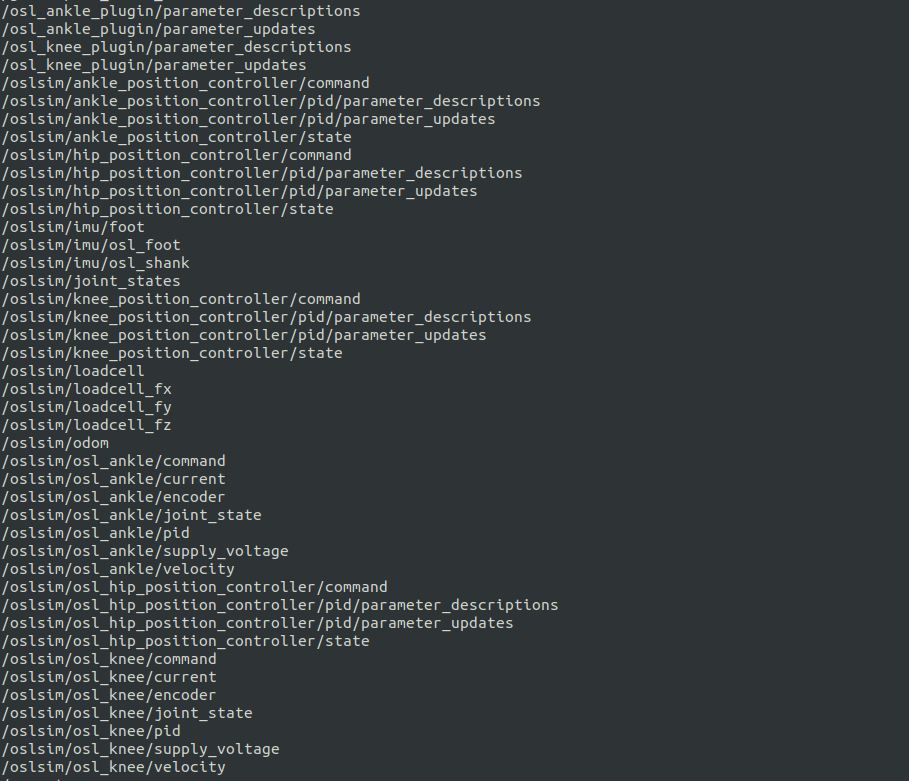
Load cells
osl_foot has a bumper plugin that acts as a load cell. The plugin publishes
- Force (fx, fy, fz)
- Torque (Tx, Ty, Tz)
- Contact positions
- Contact normals
A python script is included within this package that subscribes to the above sensor data and publishes the required ones to any desired ROS topic.
Run
To launch the simulation:
$ roslaunch oslsim main.launch control:=true
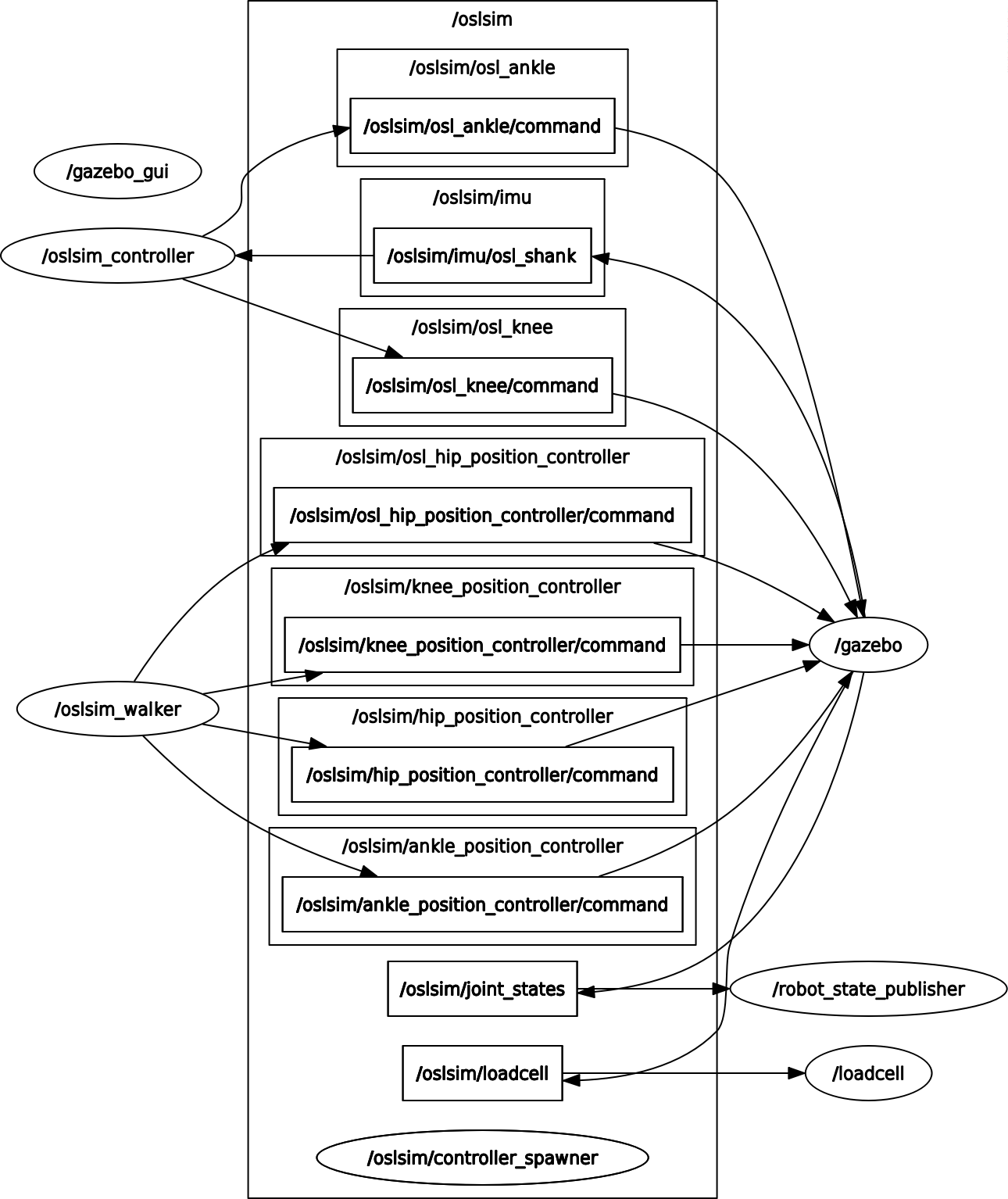
The oslsim_controller node contains an example PID controller that publishes joint commands to the respective motors (osl_knee and osl_ankle).